詳細
交換式フィクスチャー付きの標準マシンで構成されます。フィクスチャーを交換するだけで、各種ワークタイプに対応するマシンを構成できます。
ジョブチェンジは極めて迅速に行えます。フィクスチャーの交換にはほんの数秒しかかかりません。
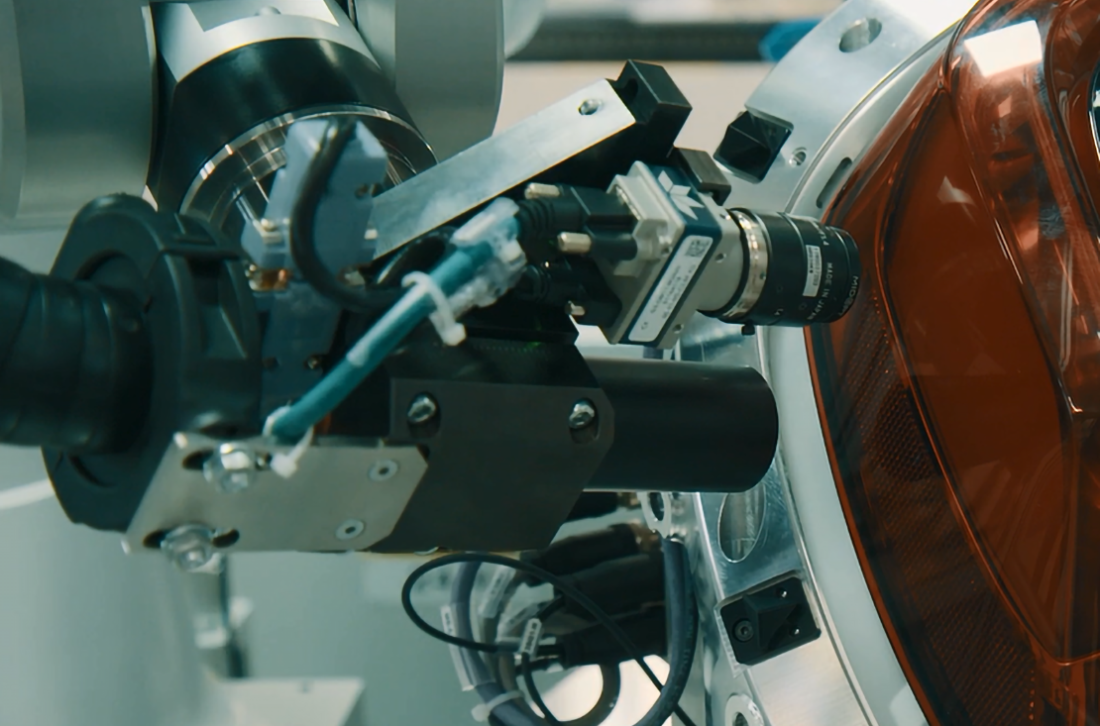
測定対象のテールランプ/ヘッドランプは、RPS(Reference Point System:基準点システム)の位置に、冶具によって固定されます。この位置は自動車メーカー様からご指示いただき、自動車ボディの固定位置に対応します。ワークは、光学テクノロジーによって、表面(フラッシュ位置)と端部(ギャップ位置)で測定されます。
フラッシュ位置は、クロマティックコンフォーカルテクノロジーをベースに、精密な光センサーで測定されます。ギャップ位置は、シャドウキャスティングテクノロジーを用いて、カメラによって測定されます。そのため、フィクスチャーには、ワークの外周部を照らすための拡散バックライトが組み込まれています。
クロマティックコンフォーカルセンサーとカメラはいずれも6軸多関節ロボットのアームに取り付けられており、そのアームによって測定ポイントの前に移動されます。
測定値は、一度に1つのポイントずつ、および連続スキャンのいずれの方法でも順次取得できます。
ロボットの軌道は、Gコードと呼ばれる言語で簡単にプログラムできます。
このフィクスチャーは、測定対象ワークを支持するだけのものではありません。「スマート」機能を備えています。フィクスチャーには、ロボットの基準点として使用する指標と、ロボット軌道を細かく校正するための校正エレメントが組み込まれています。アプリケーションに応じて、このフィクスチャーに、例えばバーコードリーダー、空圧式/電気式アクチュエーター、センサー、その他電子装置などのトレーサビリティ装置を組み込んで、マシンと通信することもできます。
グラフィックインターフェースを用いたユーザーフレンドリーなソフトウェアにより、測定対象ワークの状態の全体像がすぐに得られます。
利点
高い柔軟性
-
標準マシン + 測定対象ワーク専用の交換式フィクスチャー
-
迅速なジョブチェンジ
-
測定ポイントの追加がいつでも可能、フィクスチャーの機械的な改造は不要。
非接触テクノロジー
-
ワークとの接触がなく、ワークを傷つけるリスクがありません。
サイクルタイム
-
接触式センサーを使用した他のロボットソリューションに比べて、サイクルタイムが短縮できます。
スペック
| 測定可能なワークの最大寸法 | 最大600 mm x 300 mm x 300 mm |
| 測定時間 | ワーク寸法と測定ポイントの数と位置による。 平均スキャニング速度:40 mm/sec |
| 測定繰り返し精度 | ≤+/- 0,015 mm |
| 測定精度 | ≤+/- 0.03 mm |
ダウンロード
カタログおよびマニュアル
| フライヤー | |
|---|---|
| 英語 |
CAR LIGHTINGS: (861.22kB)
|