一种创新的(专利申请)柔性机械,基于光学技术(相机和彩色共焦传感器),用于测量前照灯或后照灯上的间隙和冲洗点。
它由一台标准机器和可互换的夹具组成。只需更换夹具,就可以为不同的零件类型配置机器。
工作变动很快。更换一个固定装置只需要几分钟。
待测车灯/前照灯参照汽车制造商所示的RPS(参照点系统)点中的夹具,与车身上的固定点相对应。利用光学技术对零件的表面(冲辉点)和边缘(间隙点)进行了测量。
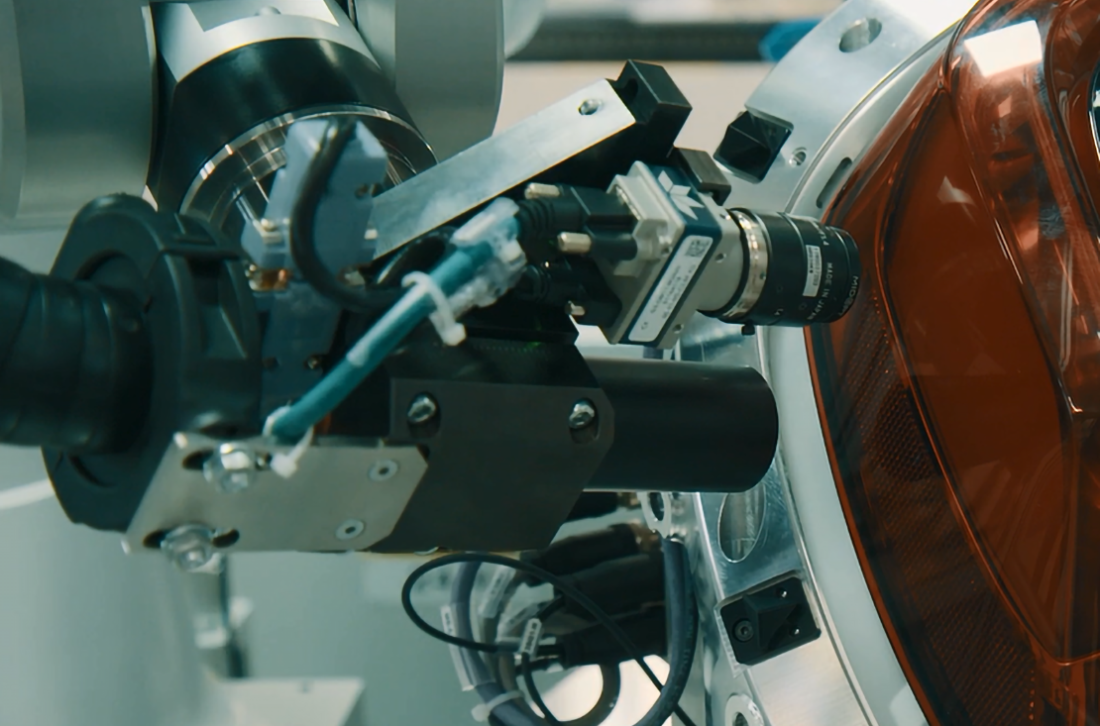
采用基于彩色共焦技术的精密光学传感器测量冲洗点。利用投影技术,用摄像机测量间隙点。为此,夹具集成了一个扩散背光照亮零件周边。
彩色共焦传感器和相机都安装在6轴拟人机器人的手臂上,将其置于测量点前。
测量可以按顺序进行,一次一个点,或者通过连续扫描。
利用g语言可以方便地对机器人的运动轨迹进行编程。
夹具不仅是被测零件的支承。它是一个“智能”对象。它集成了基准,作为机器人的参考点,并校准了用于精确校准机器人轨迹的元素。基于应用,该夹具还可以集成可追溯设备,如条形码阅读器、气动或电动执行器、传感器等电子设备与机器进行通信。
一个具有图形界面的用户友好软件,可以让操作者立即了解被测零件的状态。
取决于零件的尺寸和测量点的数量/位置。
平均扫描速度为40mm/秒。
电子邮箱
密码
邮箱或密码错误。
请输入您的电子邮箱并重置密码。
无法发送重置密码电子邮件,请稍后再试。
您输入的账户信息不正确。
您的请求已成功发送! 系统会自动发送电子邮件来重置您的密码。 您必须点击邮件中的链接来重置您的密码。
如您尚未注册,可立即免费注册!点击此处!
Please call your local assistance at marposs-care-contact or complete the form directly on the website. Service people are ready to assist you between 8 AM and 5 PM, Monday through Friday.
为了使邮件能直接被发送给相关负责部门,请在下面列表中的选择对应的应用范围:
在递交表格前,请您仔细阅读 欧盟第2016/679条 关于如何处理个人资料的条例。.
获取马波斯新闻及产品更新